Video Overview
Abstract
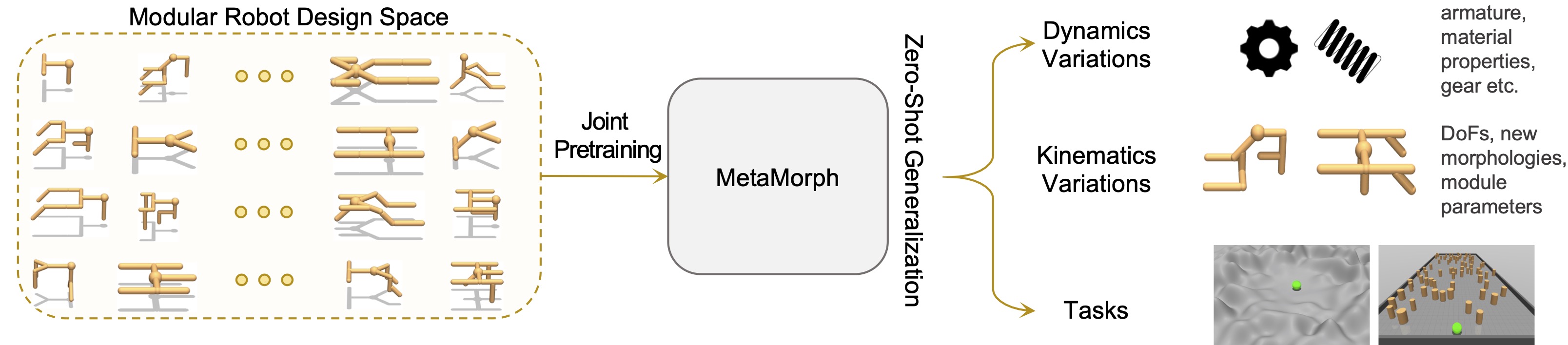
Multiple domains like vision, natural language, and audio are witnessing tremendous progress by leveraging Transformers for large scale pre-training followed by task specific fine tuning. In contrast, in robotics we primarily train a single robot for a single task. However, modular robot systems now allow for the flexible combination of general-purpose building blocks into task optimized morphologies. However, given the exponentially large number of possible robot morphologies, training a controller for each new design is impractical.
In this work, we propose MetaMorph, a Transformer based approach to learn a universal controller over a modular robot design space. MetaMorph is based on the insight that robot morphology is just another modality on which we can condition the output of a Transformer. Through extensive experiments we demonstrate that large scale pre-training on a variety of robot morphologies results in policies with combinatorial generalization capabilities, including zero shot generalization to unseen robot morphologies. We further demonstrate that our pre-trained policy can be used for sample-efficient transfer to completely new robot morphologies and tasks.
Experiment Results
Citation
@inproceedings{
gupta2022metamorph,
title={MetaMorph: Learning Universal Controllers with Transformers},
author={Agrim Gupta and Linxi Fan and Surya Ganguli and Li Fei-Fei},
booktitle={International Conference on Learning Representations},
year={2022},
url={https://openreview.net/forum?id=Opmqtk_GvYL}
}